Le principe de câble Ethernet industriel servomoteur de commande
1. Mode de fonctionnement du servomoteur contrôlé par Câble Ethernet
Les servomoteurs de contrôle Ethernet industriel contrôlent le mouvement des servomoteurs en transmettant des signaux de commande numériques. Cette méthode de contrôle présente les avantages d'une grande précision, d'une vitesse de réponse rapide et de bonnes performances anti-interférences par rapport à la méthode de contrôle analogique. Dans câble réseau Contrôle, les signaux de commande sont convertis en signaux numériques pour obtenir un contrôle précis du mouvement du servomoteur. La transmission du signal de commande utilise généralement des protocoles de communication série standard tels que RS232 et RS485.
2. Principe de transmission du signal de contrôle
La transmission des signaux de commande pour câbles Ethernet industriels le contrôle des servomoteurs nécessite l'utilisation de plusieurs composants tels que des encodeurs, des DAC (convertisseurs numérique-analogique), des contrôleurs PID et des pilotes. Les encodeurs peuvent convertir le mouvement mécanique en signaux électriques, les DAC peuvent convertir les signaux numériques en signaux analogiques, les contrôleurs PID peuvent réaliser une correction du signal et une sortie fluide, et les pilotes sont responsables de la transmission des signaux traités aux servomoteurs, réalisant ainsi le contrôle du mouvement des servomoteurs.
3、Rôle du contrôleur
Le contrôleur est au cœur de câble de réseau industriel servomoteurs contrôlés, responsables de la réception des signaux de commande et du traitement, de la correction, du filtrage, de la transformation et de la sortie des signaux. Lors de la conception des systèmes de contrôle, les contrôleurs doivent également disposer de certaines capacités de calcul, de stockage et de communication. La sélection d'un contrôleur doit prendre en compte des facteurs tels que la nature du signal de commande, les exigences de contrôle, le coût et la fiabilité.
4. Sélection du contrôleur

1. communication de contrôle de mouvement en temps réel
Configuration des paramètres et diagnostic
Mise en réseau du système
Protocole Ethernet industriel grand public (spécifique aux servos)
| Protocole | Taux de transmission | Performances de synchronisation | Fabricants représentatifs | Exigences en matière de câble |
|---|---|---|---|---|
| EtherCAT | 100Mbps | Ultra-élevé (niveau µs) | Beckhoff, Omron, Innovation | Câbles blindés Ethernet Cat5e/cat6a |
| IRT Profinet | 100Mbps | Haut | Siemens | Câbles dédiés Profinet Type A/B/C |
| MÉCHATROLINK-III | 100Mbps | Haut | Yaskawa, Panasonic | Norme M3 câbles Ethernet blindés |
| EtherNet/IP | 100Mbps | Moyen-élevé | Rockwell | Cat5e/Câble blindé Cat6a |
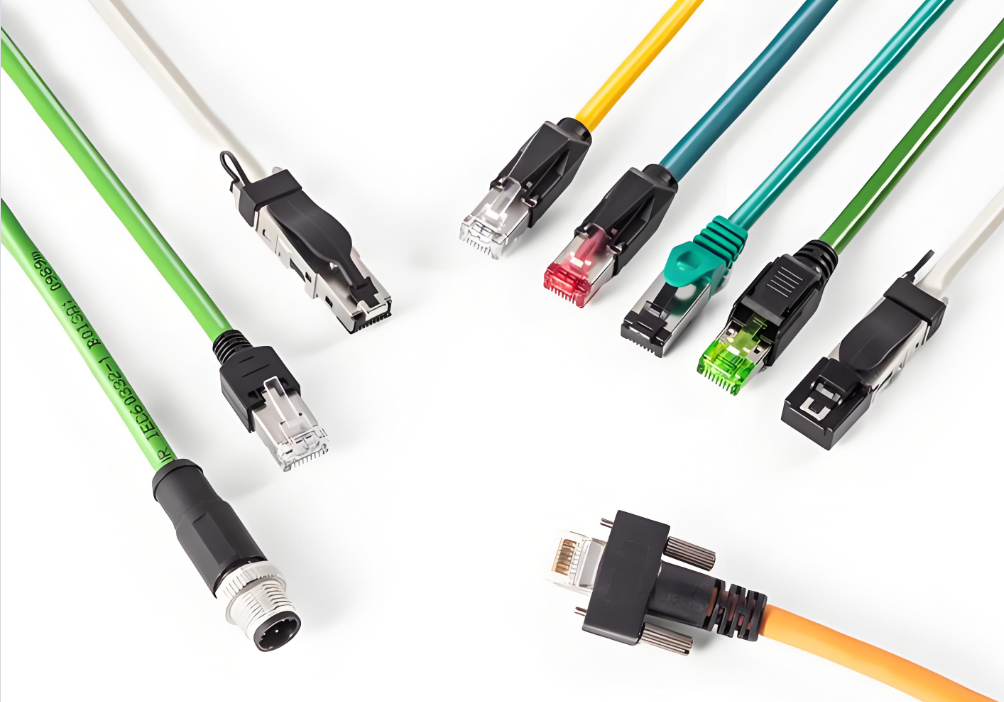
Principales caractéristiques des câbles Ethernet industriels (spécifiques aux servos)
1. Conception anti-interférence forte
Blindage Double couche (SF/UTP, S/FTP): feuille d'aluminium (F) + maille tressée en cuivre étamé (S), couverture de blindage> 85%, résistant fortement
● interférences électromagnétiques (EMI) générées par les convertisseurs de fréquence et les moteurs.
● Structure à paires torsadées : les paires de fils sont étroitement torsadées par paires pour contrecarrer les interférences en mode différentiel, avec une impédance caractéristique de 100 ± 15 Ω.
2.Câble Ethernet haute flexibilité et durabilité (scénario de chaîne de traînage)
● Conducteur : plusieurs brins toronnés de fil de cuivre ultra fin sans oxygène (tel que 28 × 0,08 mm), résistant aux flexions répétées.
● Gaine extérieure : En matériau PUR (polyuréthane) ou PVC modifié de haute qualité, résistant à l'huile, à l'usure, aux basses températures et à la torsion.
● Rayon de courbure : type chaîne porte-câbles ≥ 10 x diamètre du fil, avec une durée de vie de 5 à 10 millions de virages.
3. performances de transmission
● Catégorie : Cat5e (100 Mbps), Cat6a (1G), prenant en charge des vitesses de 100 Mbps/1 Gbps.
● Nombre de cœurs : 8 cœurs (4x2x0,14mm²). Le protocole Profinet/EtherCAT impose des fils blindés à 8 conducteurs pour garantir les performances électriques et la capacité anti-interférence.

4、 Points clés de la sélection Câble Ethernet à double blindage pour systèmes d'asservissement
● Sélectionnez le type en fonction des conditions de fonctionnement
Installation fixe (à l'intérieur de l'armoire électrique) : Choisir Profinet Type A (gaine PVC, 4 conducteurs/8 conducteurs).
Mouvement occasionnel : Choisissez le type B (PVC souple).
Chaîne de traînage/robot : Choisissez le type C (câble PUR haute flexibilité, résistant à la flexion).
● Blindage et mise à la terre
Câble réseau blindé doit être utilisé avec les deux extrémités de la couche de blindage mises à la terre (résistance de mise à la terre < 10 m Ω).
● connecteur
Connecteurs prioritaires RJ45 (qualité industrielle, IP67) ou M12 D-code/X-code, anti vibration et anti desserrage.
5. Problèmes courants et solutions
● Interruption de communication, gigue du servo, perte de paquets
Raison : Utilisation de câbles réseau ordinaires non blindés, blindage non mis à la terre, câblage parallèle aux lignes électriques.
Solution : remplacez le double câble Ethernet industriel blindé, avec une distance ≥ 30 cm entre la ligne électrique et le câble, ou les isoler par une cloison métallique.
● Rupture interne de la chaîne porte-câbles
Raison : Avec des câbles de réseau fixes ordinaires, le rayon de courbure est insuffisant.
Solution : Utilisez un câble Ethernet dédié à chaîne porte-câbles haute flexibilité (gaine PUR, conducteur multibrins).

résumé
Dans les systèmes de servomoteurs, les câbles Ethernet industriels ont complètement remplacé la méthode traditionnelle de contrôle analogique impulsion+direction et sont devenus une configuration standard pour les servos de bus. Sa valeur fondamentale réside dans la simplification du câblage, l'amélioration de la vitesse, l'amélioration de l'anti-interférence et la réalisation d'une synchronisation de haute précision de plusieurs axes. Il s’agit d’un composant de base indispensable à la fabrication intelligente moderne, aux robots industriels et aux équipements CNC.