Nguyên tắc của cáp Ethernet công nghiệp điều khiển động cơ servo
1.Chế độ làm việc của động cơ servo được điều khiển bởi cáp Ethernet
Động cơ servo điều khiển Ethernet công nghiệp điều khiển chuyển động của động cơ servo bằng cách truyền tín hiệu điều khiển kỹ thuật số. Phương pháp điều khiển này có ưu điểm là độ chính xác cao, tốc độ phản hồi nhanh và hiệu suất chống nhiễu tốt so với phương pháp điều khiển analog. TRONG cáp mạng điều khiển, các tín hiệu điều khiển được chuyển đổi thành tín hiệu số để đạt được khả năng điều khiển chính xác chuyển động của động cơ servo. Việc truyền tín hiệu điều khiển thường sử dụng các giao thức truyền thông nối tiếp tiêu chuẩn như RS232 và RS485.
2. Nguyên lý truyền tín hiệu điều khiển
Việc truyền tín hiệu điều khiển cho cáp Ethernet công nghiệp để điều khiển động cơ servo yêu cầu sử dụng nhiều thành phần như bộ mã hóa, DAC (bộ chuyển đổi kỹ thuật số sang analog), bộ điều khiển PID và trình điều khiển. Bộ mã hóa có thể chuyển đổi chuyển động cơ học thành tín hiệu điện, DAC có thể chuyển đổi tín hiệu số thành tín hiệu tương tự, bộ điều khiển PID có thể hiệu chỉnh tín hiệu và đầu ra trơn tru, còn trình điều khiển chịu trách nhiệm truyền tín hiệu đã xử lý đến động cơ servo, từ đó đạt được khả năng điều khiển chuyển động của động cơ servo.
3, Vai trò của bộ điều khiển
Bộ điều khiển là cốt lõi của cáp mạng công nghiệp Động cơ servo được điều khiển, chịu trách nhiệm nhận tín hiệu điều khiển và xử lý, hiệu chỉnh, lọc, chuyển đổi và xuất tín hiệu. Trong thiết kế hệ thống điều khiển, bộ điều khiển cũng cần có khả năng tính toán, lưu trữ và giao tiếp nhất định. Việc lựa chọn bộ điều khiển phải tính đến các yếu tố như bản chất của tín hiệu điều khiển, yêu cầu điều khiển, chi phí và độ tin cậy.
4. Lựa chọn bộ điều khiển

1. Giao tiếp điều khiển chuyển động theo thời gian thực
Cấu hình tham số và chẩn đoán
Mạng hệ thống
Giao thức Ethernet công nghiệp chính thống (cụ thể về servo)
| Giao thức | Tốc độ truyền | Hiệu suất đồng bộ hóa | Nhà sản xuất đại diện | Yêu cầu về cáp |
|---|---|---|---|---|
| EtherCAT | 100Mbps | Cực cao (mức µs) | Beckhoff, Omron, Đổi Mới | Cáp được bảo vệ ethernet Cat5e/cat6a |
| IRT Profinet | 100Mbps | Cao | Siemens | Cáp chuyên dụng Profinet Loại A/B/C |
| MECHATROLINK-III | 100Mbps | Cao | Yaskawa, Panasonic | Tiêu chuẩn M3 cáp Ethernet được bảo vệ |
| EtherNet/IP | 100Mbps | Trung bình-Cao | Rockwell | Cat5e/Cáp được bảo vệ Cat6a |
Đặc điểm chính của cáp Ethernet công nghiệp (cụ thể về servo)
1. Thiết kế chống nhiễu mạnh mẽ
Che chắn hai lớp (SF/UTP, S/FTP): lá nhôm (F) + lưới bện đồng đóng hộp (S), độ che chắn>85%, chống chịu lực tốt
● nhiễu điện từ (EMI) do bộ biến tần và động cơ tạo ra.
● Cấu trúc cặp xoắn: Các cặp dây được xoắn chặt thành từng cặp để chống nhiễu chế độ vi sai, có trở kháng đặc tính 100 ± 15 Ω.
2.Cáp Ethernet có tính linh hoạt cao và độ bền (kịch bản dây kéo)
● Dây dẫn: Dây đồng không chứa oxy siêu mịn được bện thành nhiều sợi (chẳng hạn như 28 × 0,08mm), có khả năng chống uốn cong nhiều lần.
● Vỏ ngoài: Được làm bằng vật liệu PUR (polyurethane) hoặc PVC biến tính chất lượng cao, có khả năng chống dầu, mài mòn, nhiệt độ thấp và xoắn.
● Bán kính uốn: loại xích kéo có đường kính dây ≥ 10 x, tuổi thọ từ 5 đến 10 triệu lần uốn.
3. hiệu suất truyền tải
● Danh mục: Cat5e (100Mbps), Cat6a (1G), hỗ trợ tốc độ 100Mbps/1Gbps.
● Số lõi: 8 lõi (4x2x0,14mm ²). Giao thức Profinet/EtherCAT yêu cầu dây được bảo vệ 8 lõi để đảm bảo hiệu suất điện và khả năng chống nhiễu.

4, Những điểm chính để lựa chọn Cáp Ethernet được bảo vệ kép cho hệ thống servo
● Chọn loại dựa trên điều kiện hoạt động
Lắp đặt cố định (bên trong tủ điện): Chọn Profinet Type A (vỏ PVC, 4 lõi/8 lõi).
Thỉnh thoảng di chuyển: Chọn Loại B (PVC dẻo).
Xích kéo/robot: Chọn Loại C (cáp PUR có tính linh hoạt cao, chịu uốn).
● Che chắn và nối đất
Cáp mạng được bảo vệ phải được sử dụng với cả hai đầu của lớp che chắn được nối đất (điện trở nối đất <10m Ω).
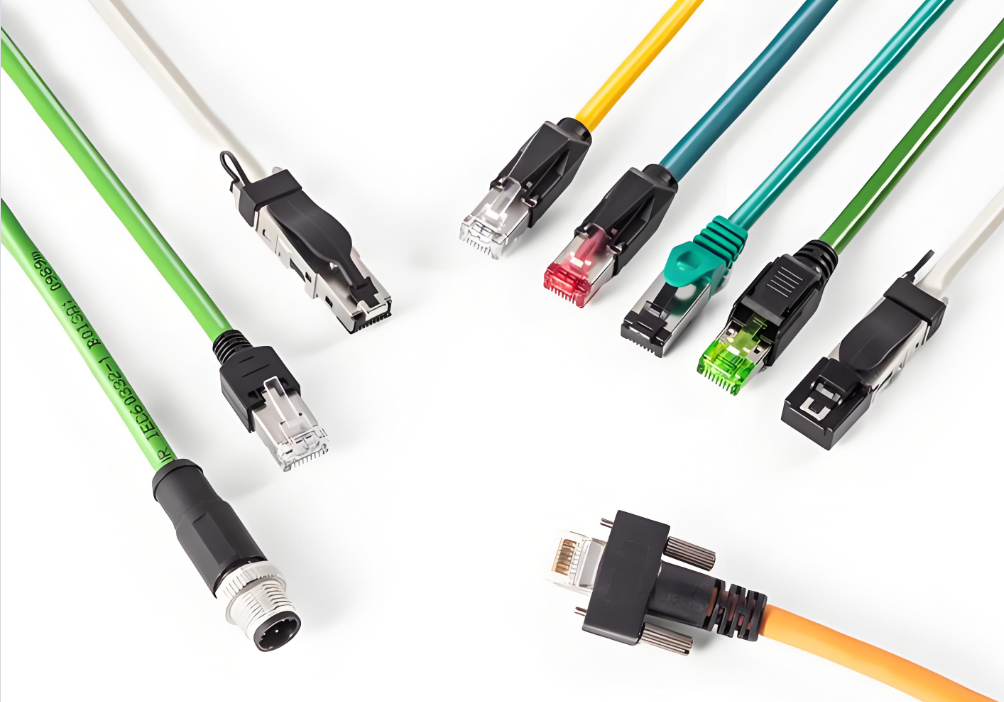
● đầu nối
Ưu tiên đầu nối RJ45 (cấp công nghiệp, IP67) hoặc M12 D-code/X-code, chống rung và chống lỏng.
5. Các vấn đề thường gặp và giải pháp
● Truyền thông bị gián đoạn, giật servo, mất gói
Nguyên nhân: Sử dụng cáp mạng thông thường không có vỏ bọc, vỏ bọc không nối đất, đi dây song song với đường dây điện.
Giải pháp: Thay thế kép cáp Ethernet công nghiệp được bảo vệ, với khoảng cách ≥ 30cm giữa đường dây điện và cáp hoặc cách ly chúng bằng vách ngăn kim loại.
● đứt bên trong xích kéo
Nguyên nhân: Sử dụng cáp mạng cố định thông thường nên bán kính uốn cong không đủ.
Giải pháp: Sử dụng cáp Ethernet chuyên dụng có dây kéo có độ linh hoạt cao (vỏ bọc PUR, dây dẫn nhiều sợi).

bản tóm tắt
Trong các hệ thống động cơ servo, cáp Ethernet công nghiệp đã thay thế hoàn toàn phương pháp điều khiển tương tự xung+hướng truyền thống và trở thành cấu hình tiêu chuẩn cho động cơ servo bus. Giá trị cốt lõi của nó nằm ở việc đơn giản hóa hệ thống dây điện, cải thiện tốc độ, tăng cường khả năng chống nhiễu và đạt được sự đồng bộ hóa có độ chính xác cao của nhiều trục. Nó là thành phần cơ bản không thể thiếu trong sản xuất thông minh hiện đại, robot công nghiệp và thiết bị CNC.