ilkesi endüstriyel Ethernet kablosu servo motoru kontrol etmek
1. tarafından kontrol edilen servo motorun çalışma modu Ethernet kablosu
Endüstriyel Ethernet kontrollü servo motorlar, dijital kontrol sinyallerini ileterek servo motorların hareketini kontrol eder. Bu kontrol yöntemi, analog kontrol yöntemiyle karşılaştırıldığında yüksek doğruluk, hızlı yanıt hızı ve iyi parazit önleme performansı gibi avantajlara sahiptir. İçinde ağ kablosu kontrol, servo motor hareketinin hassas kontrolünü sağlamak için kontrol sinyalleri dijital sinyallere dönüştürülür. Kontrol sinyali iletimi tipik olarak RS232 ve RS485 gibi standart seri iletişim protokollerini kullanır.
2. Kontrol Sinyali İletim Prensibi
Kontrol sinyallerinin iletimi endüstriyel Ethernet kabloları Servo motorları kontrol etmek için kodlayıcılar, DAC'ler (dijitalden analoğa dönüştürücüler), PID kontrolörleri ve sürücüler gibi birden fazla bileşenin kullanılması gerekir. Kodlayıcılar mekanik hareketi elektrik sinyallerine dönüştürebilir, DAC'ler dijital sinyalleri analog sinyallere dönüştürebilir, PID kontrolörleri sinyal düzeltme ve düzgün çıkış sağlayabilir ve sürücüler, işlenmiş sinyallerin servo motorlara iletilmesinden ve böylece servo motorların hareket kontrolünün sağlanmasından sorumludur.
3、 Kontrolörün rolü
Kontrolör işin temelidir endüstriyel ağ kablosu Kontrol sinyallerinin alınmasından ve sinyallerin işlenmesinden, düzeltilmesinden, filtrelenmesinden, dönüştürülmesinden ve çıkışından sorumlu olan kontrollü servo motorlar. Kontrol sistemlerinin tasarımında kontrolörlerin ayrıca belirli bilgi işlem, depolama ve iletişim yeteneklerine sahip olmaları gerekir. Bir kontrolörün seçiminde kontrol sinyalinin doğası, kontrol gereksinimleri, maliyet ve güvenilirlik gibi faktörler dikkate alınmalıdır.
4. Kontrolör Seçimi

1.Gerçek zamanlı hareket kontrolü iletişimi
Parametre konfigürasyonu ve teşhis
Sistem ağı
Ana akım endüstriyel Ethernet protokolü (servoya özel)
| Protokol | İletim Hızı | Senkronizasyon Performansı | Temsilci Üreticiler | Kablo Gereksinimleri |
|---|---|---|---|---|
| EtherCAT | 100Mbps | Ultra yüksek (μs seviyesi) | Beckhoff, Omron, İnovasyon | Cat5e/cat6a ethernet korumalı kablolar |
| Profinet IRT | 100Mbps | Yüksek | Siemens | Profinet Tip A/B/C özel kablolar |
| MEKATROLİNK-III | 100Mbps | Yüksek | Yaskawa, Panasonic | M3 standardı korumalı Ethernet kabloları |
| EthernetNet/IP | 100Mbps | Orta-Yüksek | Rockwell | Cat5e/Cat6a korumalı kablo |
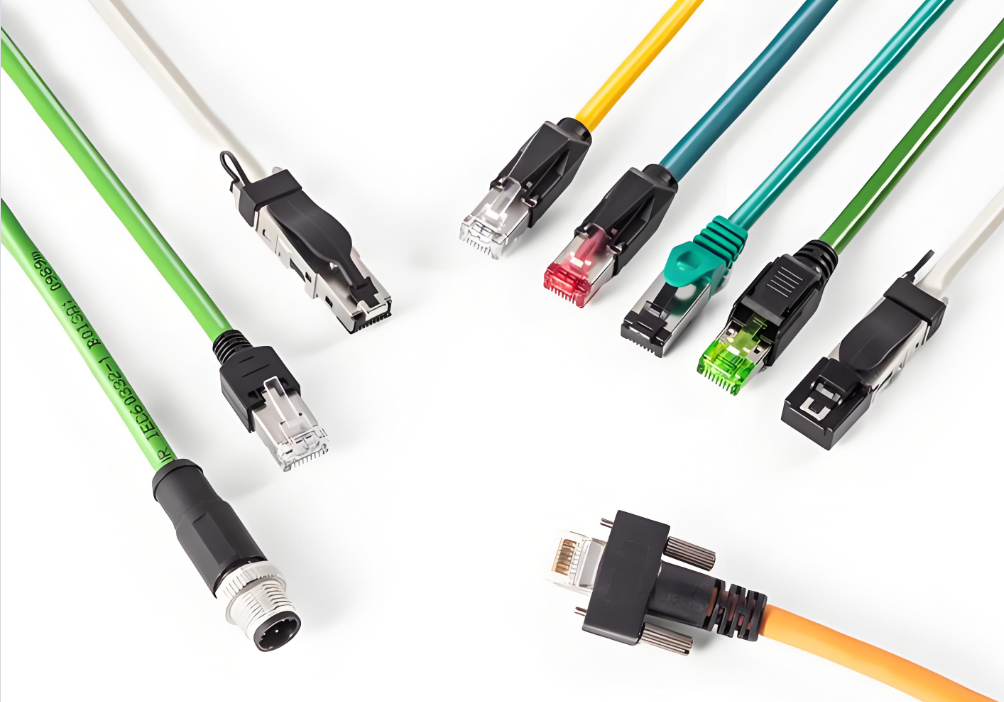
Endüstriyel Ethernet kablolarının temel özellikleri (servoya özel)
1.Güçlü anti-parazit tasarımı
Çift katmanlı ekranlama (SF/UTP, S/FTP): alüminyum folyo (F)+kalaylı bakır örgülü ağ (S), koruma kapsamı>�, güçlü dirence sahip
● frekans dönüştürücüler ve motorlar tarafından üretilen elektromanyetik girişim (EMI).
● Bükümlü çift yapısı: Kablo çiftleri, 100 ± 15 Ω karakteristik empedans ile diferansiyel mod girişimini engellemek için çiftler halinde sıkı bir şekilde bükülür.
2.Yüksek esnekliğe sahip Ethernet kablosu ve dayanıklılık (çekme zinciri senaryosu)
● İletken: Tekrarlanan bükülmelere karşı dayanıklı, çok telli çok ince oksijensiz bakır tel (28 × 0,08 mm gibi).
● Dış kılıf: PUR (poliüretan) malzemeden veya yüksek kaliteli modifiye PVC'den yapılmış olup yağa, aşınmaya, düşük sıcaklığa ve burulmalara karşı dayanıklıdır.
● Bükülme yarıçapı: çekme zinciri tipi ≥ 10 x tel çapı, 5 ila 10 milyon bükülme ömrüne sahiptir.
3. iletim performansı
● Kategori: Cat5e (100Mbps), Cat6a (1G), 100Mbps/1Gbps hızlarını destekler.
● Çekirdek sayısı: 8 çekirdek (4x2x0,14mm²). Profinet/EtherCAT protokolü, elektriksel performans ve parazit önleme özelliği sağlamak için 8 çekirdekli korumalı kabloları zorunlu kılar.

4、 Seçim için önemli noktalar Çift ekranlı Ethernet kablosu servo sistemler için
● Çalışma koşullarına göre türü seçin
Sabit kurulum (elektrik kabininin içinde): Profinet Tip A'yı seçin (PVC kılıf, 4 damarlı/8 damarlı).
Ara sıra hareket: Tip B'yi (esnek PVC) seçin.
Zinciri/robotu sürükleyin: C Tipi'ni seçin (yüksek esneklik PUR kablosu, bükülmeye karşı dayanıklı).
● Ekranlama ve topraklama
Korumalı ağ kablosu koruyucu katmanın her iki ucu da topraklanmış halde kullanılmalıdır (topraklama direnci<10m Ω).
● bağlayıcı
Öncelikli RJ45 (endüstriyel sınıf, IP67) veya M12 D kodu/X kodu konnektörleri, titreşim önleyici ve gevşeme önleyici.
5.Genel Sorunlar ve Çözümler
● İletişim kesintisi, servo titreşimi, paket kaybı
Sebep: Sıradan ekransız ağ kablolarının kullanılması, ekranlamanın topraklanmamış olması, elektrik hatlarına paralel kablolama.
Çözüm: İkiliyi değiştirin korumalı endüstriyel Ethernet kablosugüç hattı ile kablo arasında ≥ 30 cm mesafe olacak şekilde yerleştirin veya bunları metal bir bölmeyle yalıtın.
● çekme zincirinin iç kırılması
Sebep: Sıradan sabit ağ kabloları kullanıldığında bükülme yarıçapı yetersizdir.
Çözüm: Yüksek esnekliğe sahip çekme zincirine özel Ethernet kablosu (PUR kılıf, çok damarlı iletken) kullanın.

özet
Servo motor sistemlerinde endüstriyel Ethernet kabloları, geleneksel darbe+yön analog kontrol yönteminin tamamen yerini almış ve veri yolu servoları için standart bir konfigürasyon haline gelmiştir. Temel değeri, kablolamayı basitleştirmede, hızı artırmada, parazit önlemeyi geliştirmede ve birden fazla eksenin yüksek hassasiyette senkronizasyonunu sağlamada yatmaktadır. Modern akıllı üretim, endüstriyel robotlar ve CNC ekipmanları için vazgeçilmez bir temel bileşendir.