O princípio de cabo Ethernet industrial servomotor de controle
1. Modo de trabalho do servo motor controlado por Cabo Ethernet
Os servomotores de controle Ethernet industrial controlam o movimento dos servomotores transmitindo sinais de controle digital. Este método de controle tem as vantagens de alta precisão, velocidade de resposta rápida e bom desempenho anti-interferência em comparação com o método de controle analógico. Em cabo de rede controle, os sinais de controle são convertidos em sinais digitais para obter um controle preciso do movimento do servo motor. A transmissão do sinal de controle normalmente utiliza protocolos de comunicação serial padrão, como RS232 e RS485.
2. Princípio da Transmissão do Sinal de Controle
A transmissão de sinais de controle para cabos Ethernet industriais controlar servo motores requer o uso de vários componentes, como codificadores, DACs (conversores digital para analógico), controladores PID e drivers. Os codificadores podem converter movimento mecânico em sinais elétricos, os DACs podem converter sinais digitais em sinais analógicos, os controladores PID podem obter correção de sinal e saída suave, e os drivers são responsáveis pela transmissão de sinais processados para servo motores, alcançando assim o controle de movimento dos servo motores.
3. O papel do controlador
O controlador é o núcleo cabo de rede industrial servomotores controlados, responsáveis por receber sinais de controle e processar, corrigir, filtrar, transformar e emitir sinais. No projeto de sistemas de controle, os controladores também precisam ter determinadas capacidades de computação, armazenamento e comunicação. A seleção de um controlador deve levar em consideração fatores como a natureza do sinal de controle, requisitos de controle, custo e confiabilidade.
4. Seleção do Controlador

1. Comunicação de controle de movimento em tempo real
Configuração e diagnóstico de parâmetros
Rede do sistema
Protocolo Ethernet industrial convencional (servo específico)
| Protocolo | Taxa de transmissão | Desempenho de sincronização | Fabricantes representativos | Requisitos de cabo |
|---|---|---|---|---|
| EtherCAT | 100 Mbps | Ultra-alto (nível µs) | Beckhoff, Omron, Inovação | Cabos blindados Ethernet Cat5e/cat6a |
| Profinet IRT | 100 Mbps | Alto | Siemens | Cabos dedicados Profinet Tipo A/B/C |
| MECHATROLINK-III | 100 Mbps | Alto | Yaskawa, Panasonic | Padrão M3 cabos Ethernet blindados |
| Ethernet/IP | 100 Mbps | Médio-alto | Rockwell | Cat5e/Cabo blindado Cat6a |
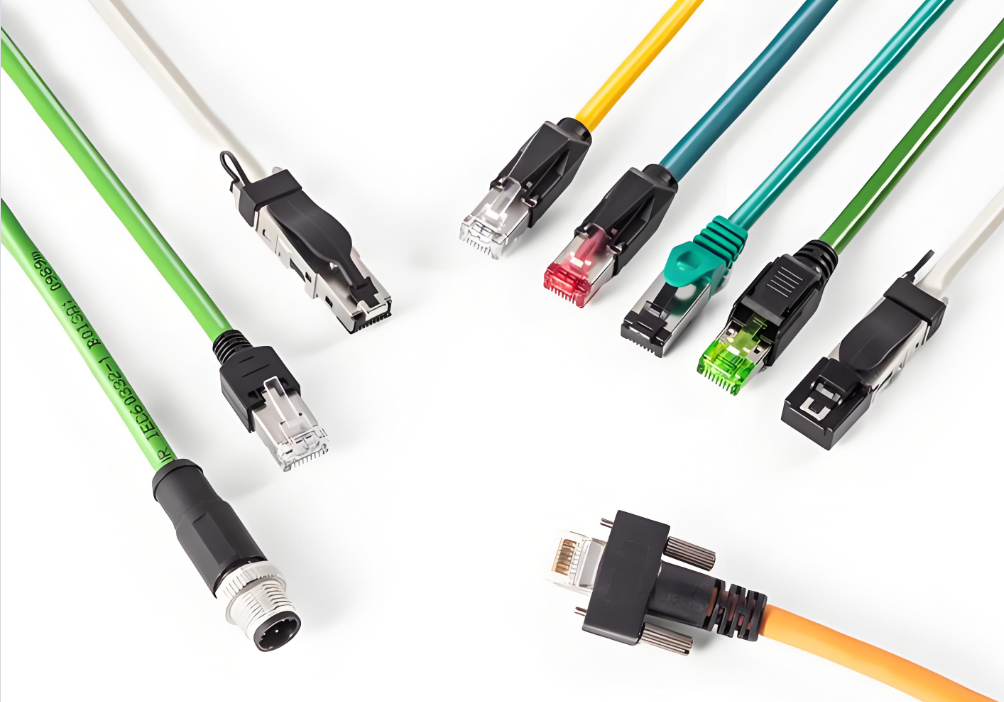
Principais características dos cabos Ethernet industriais (servo específicos)
1. Forte design anti-interferência
Blindagem de dupla camada (SF/UTP, S/FTP): folha de alumínio (F)+malha trançada de cobre estanhado (S), cobertura de blindagem> 85%, resistindo forte
● interferência eletromagnética (EMI) gerada por conversores de frequência e motores.
● Estrutura de par trançado: Os pares de fios são firmemente torcidos em pares para neutralizar a interferência do modo diferencial, com uma impedância característica de 100 ± 15 Ω.
2.Cabo Ethernet de alta flexibilidade e durabilidade (cenário de cadeia de arrasto)
● Condutor: Múltiplos fios trançados de fio de cobre ultrafino livre de oxigênio (como 28 × 0,08 mm), resistente a dobras repetidas.
● Revestimento externo: Fabricado em material PUR (poliuretano) ou PVC modificado de alta qualidade, resistente a óleo, desgaste, baixas temperaturas e torção.
● Raio de curvatura: tipo de corrente de arrasto ≥ 10 x diâmetro do fio, com vida útil de 5 a 10 milhões de curvas.
3. desempenho de transmissão
● Categoria: Cat5e (100Mbps), Cat6a (1G), suportando velocidades de 100Mbps/1Gbps.
● Número de núcleos: 8 núcleos (4x2x0,14mm²). O protocolo Profinet/EtherCAT exige fios blindados de 8 núcleos para garantir desempenho elétrico e capacidade anti-interferência.

4. Pontos-chave para selecionar Cabo Ethernet com blindagem dupla para servosistemas
● Selecione o tipo com base nas condições operacionais
Instalação fixa (dentro do quadro elétrico): Escolha Profinet Tipo A (bainha de PVC, 4 núcleos/8 núcleos).
Movimento ocasional: Escolha Tipo B (PVC flexível).
Corrente de arrasto/robô: Escolha Tipo C (cabo PUR de alta flexibilidade, resistente à flexão).
● Blindagem e aterramento
Cabo de rede blindado deve ser usado, com ambas as extremidades da camada de blindagem aterradas (resistência de aterramento<10m Ω).
● conector
Conectores prioritários RJ45 (classe industrial, IP67) ou M12 código D/código X, antivibração e anti afrouxamento.
5. Problemas e soluções comuns
● Interrupção de comunicação, servo jitter, perda de pacotes
Motivo: Utilização de cabos de rede comuns não blindados, blindagem não aterrada, fiação paralela às linhas de energia.
Solução: Substitua o duplo cabo Ethernet industrial blindado, com distância ≥ 30cm entre a linha de alimentação e o cabo, ou isolá-los com divisória metálica.
● quebra interna da corrente de arrasto
Motivo: Usando cabos de rede fixa comuns, o raio de curvatura é insuficiente.
Solução: Use cabo Ethernet dedicado de cadeia de arrasto de alta flexibilidade (bainha PUR, condutor multifilar).

resumo
Em sistemas de servomotores, os cabos Ethernet industriais substituíram completamente o tradicional método de controle analógico pulso+direção e se tornaram uma configuração padrão para servos de barramento. Seu valor principal reside na simplificação da fiação, na melhoria da velocidade, no aprimoramento da anti-interferência e na obtenção de sincronização de alta precisão de vários eixos. É um componente básico indispensável para a fabricação inteligente moderna, robôs industriais e equipamentos CNC.