Il principio di cavo Ethernet industriale servomotore di controllo
1. Modalità di funzionamento del servomotore controllato da Cavo Ethernet
I servomotori di controllo Industrial Ethernet controllano il movimento dei servomotori trasmettendo segnali di controllo digitali. Questo metodo di controllo presenta i vantaggi di elevata precisione, velocità di risposta rapida e buone prestazioni anti-interferenza rispetto al metodo di controllo analogico. In cavo di rete controllo, i segnali di controllo vengono convertiti in segnali digitali per ottenere un controllo preciso del movimento del servomotore. La trasmissione del segnale di controllo utilizza tipicamente protocolli di comunicazione seriale standard come RS232 e RS485.
2. Principio di trasmissione del segnale di controllo
La trasmissione di segnali di controllo per cavi Ethernet industriali per controllare i servomotori è necessario l'uso di più componenti come encoder, DAC (convertitori digitale-analogico), controller PID e driver. Gli encoder possono convertire il movimento meccanico in segnali elettrici, i DAC possono convertire segnali digitali in segnali analogici, i controller PID possono ottenere la correzione del segnale e un'uscita uniforme e i driver sono responsabili della trasmissione dei segnali elaborati ai servomotori, ottenendo così il controllo del movimento dei servomotori.
3、 Il ruolo del titolare del trattamento
Il controller è il nucleo di cavo di rete industriale servomotori controllati, responsabili della ricezione dei segnali di controllo e dell'elaborazione, correzione, filtraggio, trasformazione ed emissione dei segnali. Nella progettazione dei sistemi di controllo, i controllori devono inoltre disporre di determinate capacità di elaborazione, archiviazione e comunicazione. La scelta di un controller dovrebbe tenere conto di fattori quali la natura del segnale di controllo, i requisiti di controllo, i costi e l'affidabilità.
4. Selezione del controllore

1.Comunicazione di controllo del movimento in tempo reale
Configurazione parametri e diagnosi
Rete di sistema
Protocollo Ethernet industriale tradizionale (specifico per il servo)
| Protocollo | Velocità di trasmissione | Prestazioni di sincronizzazione | Produttori rappresentativi | Requisiti dei cavi |
|---|---|---|---|---|
| EtherCAT | 100Mbps | Ultra alto (livello µs) | Beckhoff, Omron, Innovazione | Cavi schermati ethernet cat5e/cat6a |
| Profinet IRT | 100Mbps | Alto | Siemens | Cavi dedicati Profinet Tipo A/B/C |
| MECHATROLINK-III | 100Mbps | Alto | Yaskawa, Panasonic | Norma M3 cavi Ethernet schermati |
| Ethernet/IP | 100Mbps | Medio-Alto | Rockwell | Cat5e/Cavo schermato Cat6a |
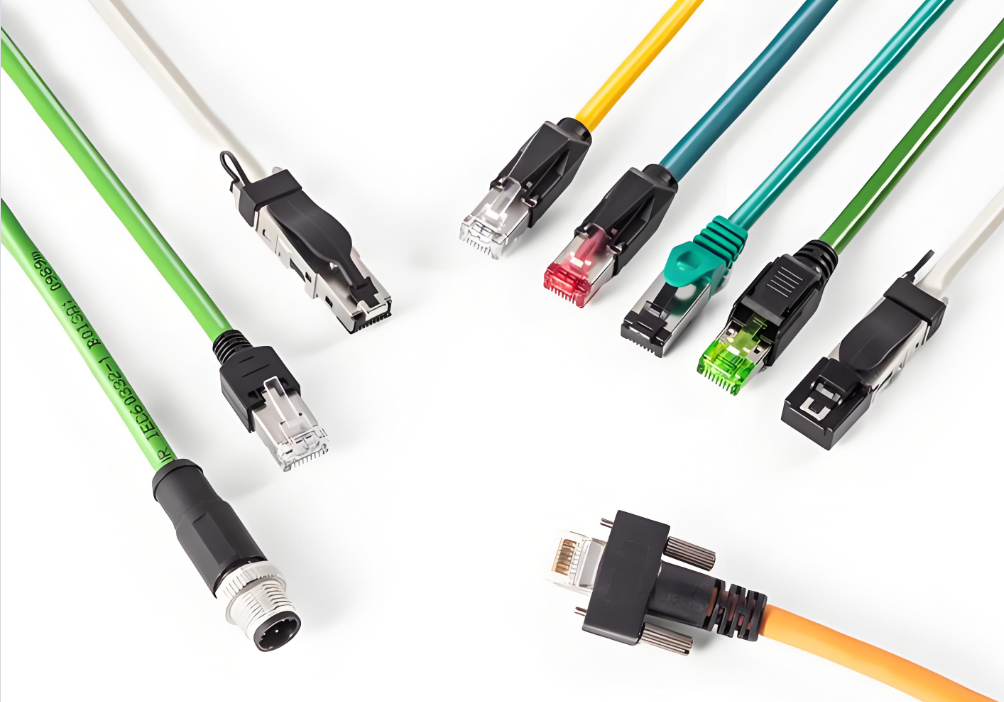
Caratteristiche principali dei cavi Ethernet industriali (specifici per servo)
1. Design anti-interferenza forte
Schermatura a doppio strato (SF/UTP, S/FTP): foglio di alluminio (F)+rete intrecciata in rame stagnato (S), copertura della schermatura>85%, resistente
● interferenze elettromagnetiche (EMI) generate da convertitori di frequenza e motori.
● Struttura a doppino intrecciato: le coppie di fili sono strettamente intrecciate a coppie per contrastare l'interferenza in modalità differenziale, con un'impedenza caratteristica di 100 ± 15 Ω.
2.Cavo Ethernet ad alta flessibilità e durabilità (scenario della catena di trascinamento)
● Conduttore: fili multipli intrecciati di filo di rame ultrasottile privo di ossigeno (come 28 × 0,08 mm), resistente alla flessione ripetuta.
● Guaina esterna: realizzata in materiale PUR (poliuretano) o PVC modificato di alta qualità, resistente all'olio, all'usura, alle basse temperature e alla torsione.
● Raggio di curvatura: tipo catena portacavi ≥ 10 x diametro del filo, con una durata da 5 a 10 milioni di curve.
3.prestazioni di trasmissione
● Categoria: Cat5e (100Mbps), Cat6a (1G), supporta velocità di 100Mbps/1Gbps.
● Numero di nuclei: 8 nuclei (4x2x0,14mm²). Il protocollo Profinet/EtherCAT impone cavi schermati a 8 conduttori per garantire prestazioni elettriche e capacità anti-interferenza.

4、 Punti chiave per la selezione Cavo Ethernet con doppia schermatura per servosistemi
● Selezionare il tipo in base alle condizioni operative
Installazione fissa (all'interno dell'armadio elettrico): scegliere Profinet Tipo A (guaina in PVC, 4 conduttori/8 conduttori).
Movimento occasionale: Scegliere Tipo B (PVC flessibile).
Catena portacavi/robot: scegliere Tipo C (cavo PUR ad alta flessibilità, resistente alla piegatura).
● Schermatura e messa a terra
Cavo di rete schermato deve essere utilizzato con entrambe le estremità dello strato schermante messe a terra (resistenza di terra <10 m Ω).
● connettore
Connettori prioritari RJ45 (grado industriale, IP67) o M12 codice D/codice X, antivibranti e antiallentamento.
5.Problemi comuni e soluzioni
● Interruzione della comunicazione, jitter servo, perdita di pacchetti
Motivo: utilizzo di normali cavi di rete non schermati, schermatura non messa a terra, cablaggio parallelo alle linee elettriche.
Soluzione: sostituire il duale cavo Ethernet industriale schermato, con una distanza ≥ 30 cm tra la linea di alimentazione e il cavo, oppure isolarli con una partizione metallica.
● Rottura interna della catena portacavi
Motivo: Utilizzando normali cavi di rete fissa il raggio di curvatura non è sufficiente.
Soluzione: utilizzare un cavo Ethernet dedicato per catena portacavi ad alta flessibilità (guaina in PUR, conduttore multifilare).

riepilogo
Nei sistemi di servomotori, i cavi Ethernet industriali hanno completamente sostituito il tradizionale metodo di controllo analogico impulso+direzione e sono diventati una configurazione standard per i servo bus. Il suo valore fondamentale risiede nella semplificazione del cablaggio, nel miglioramento della velocità, nel potenziamento dell'anti-interferenza e nel raggiungimento della sincronizzazione ad alta precisione di più assi. È un componente di base indispensabile per la moderna produzione intelligente, i robot industriali e le apparecchiature CNC.