El principio de cable ethernet industrial controlar el servomotor
1.Modo de trabajo del servomotor controlado por cable ethernet
Los servomotores de control Ethernet industrial controlan el movimiento de los servomotores mediante la transmisión de señales de control digitales. Este método de control tiene las ventajas de una alta precisión, una velocidad de respuesta rápida y un buen rendimiento antiinterferencias en comparación con el método de control analógico. En cable de red control, las señales de control se convierten en señales digitales para lograr un control preciso del movimiento del servomotor. La transmisión de señales de control normalmente utiliza protocolos de comunicación serie estándar como RS232 y RS485.
2. Principio de transmisión de señales de control
La transmisión de señales de control para cables ethernet industriales Para controlar servomotores se requiere el uso de múltiples componentes, como codificadores, DAC (convertidores de digital a analógico), controladores PID y controladores. Los codificadores pueden convertir el movimiento mecánico en señales eléctricas, los DAC pueden convertir señales digitales en señales analógicas, los controladores PID pueden lograr corrección de señal y una salida suave, y los controladores son responsables de transmitir señales procesadas a servomotores, logrando así el control de movimiento de los servomotores.
3. El papel del controlador.
El controlador es el núcleo de cable de red industrial Servomotores controlados, responsables de recibir señales de control y procesar, corregir, filtrar, transformar y emitir señales. En el diseño de sistemas de control, los controladores también necesitan tener ciertas capacidades informáticas, de almacenamiento y de comunicación. La selección de un controlador debe tener en cuenta factores como la naturaleza de la señal de control, los requisitos de control, el costo y la confiabilidad.
4. Selección del controlador

1.Comunicación de control de movimiento en tiempo real
Configuración y diagnóstico de parámetros.
Redes del sistema
Protocolo Ethernet industrial convencional (servo específico)
| Protocolo | Velocidad de transmisión | Rendimiento de sincronización | Fabricantes representativos | Requisitos de cables |
|---|---|---|---|---|
| EtherCAT | 100Mbps | Ultra alto (nivel µs) | Beckhoff, Omron, Innovación | Cables blindados ethernet cat5e/cat6a |
| IRT Profinet | 100Mbps | Alto | siemens | Cables dedicados Profinet tipo A/B/C |
| MECHATROENLACE-III | 100Mbps | Alto | Yaskawa, Panasonic | Estándar M3 cables ethernet blindados |
| Ethernet/IP | 100Mbps | Medio-alto | rockwell | Cat5e/Cable blindado Cat6a |
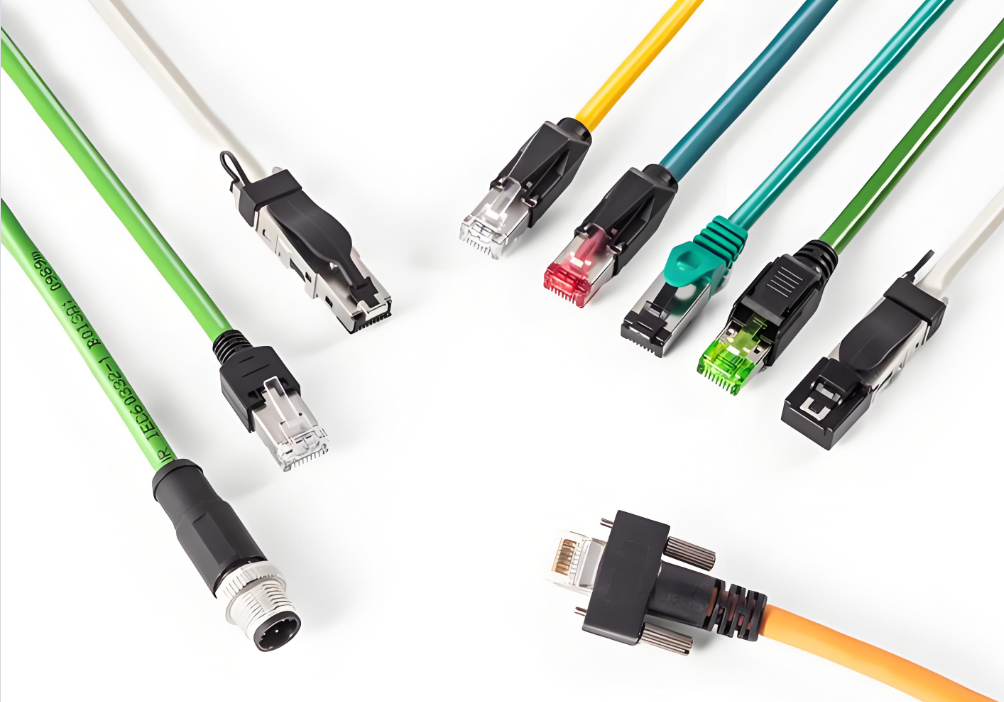
Características clave de los cables Ethernet industriales (servo específicos)
1. Fuerte diseño antiinterferencias.
Blindaje de doble capa (SF/UTP, S/FTP): papel de aluminio (F)+malla trenzada de cobre estañado (S), cobertura de blindaje>85%, resistente
● interferencias electromagnéticas (EMI) generadas por convertidores de frecuencia y motores.
● Estructura de par trenzado: Los pares de cables están fuertemente trenzados en pares para contrarrestar la interferencia del modo diferencial, con una impedancia característica de 100 ± 15 Ω.
2.Cable Ethernet de alta flexibilidad y durabilidad (escenario de cadena de arrastre)
● Conductor: múltiples hilos trenzados de alambre de cobre ultrafino libre de oxígeno (como 28 × 0,08 mm), resistente a dobleces repetidas.
● Funda exterior: Fabricada en material PUR (poliuretano) o PVC modificado de alta calidad, resistente al aceite, desgaste, bajas temperaturas y torsión.
● Radio de curvatura: tipo cadena de arrastre ≥ 10 x diámetro del alambre, con una vida útil de 5 a 10 millones de curvaturas.
3.rendimiento de transmisión
● Categoría: Cat5e (100Mbps), Cat6a (1G), que admite velocidades de 100Mbps/1Gbps.
● Número de núcleos: 8 núcleos (4x2x0,14mm²). El protocolo Profinet/EtherCAT exige cables blindados de 8 núcleos para garantizar el rendimiento eléctrico y la capacidad antiinterferencias.

4. Puntos clave para seleccionar Cable Ethernet con doble blindaje para servosistemas
● Seleccione el tipo según las condiciones de funcionamiento.
Instalación fija (dentro del armario eléctrico): Elija Profinet Tipo A (funda de PVC, 4 hilos/8 hilos).
Movimiento ocasional: Elija el Tipo B (PVC flexible).
Cadena de arrastre/robot: Elija el tipo C (cable PUR de alta flexibilidad, resistente a la flexión).
● Blindaje y puesta a tierra
Cable de red blindado Se debe utilizar, con ambos extremos de la capa de blindaje conectados a tierra (resistencia de conexión a tierra <10 m Ω).
● conector
Conectores prioritarios RJ45 (grado industrial, IP67) o M12 código D/código X, antivibración y antiaflojamiento.
5.Problemas y soluciones comunes
● Interrupción de la comunicación, fluctuación del servo, pérdida de paquetes
Motivo: uso de cables de red normales sin blindaje, blindaje sin conexión a tierra, cableado paralelo a líneas eléctricas.
Solución: reemplace el doble cable Ethernet industrial blindado, con una distancia ≥ 30cm entre la línea eléctrica y el cable, o aislarlos con un tabique metálico.
● rotura interna de la cadena de arrastre
Motivo: Al utilizar cables de red fijos normales, el radio de curvatura es insuficiente.
Solución: Utilice un cable Ethernet dedicado con cadena de arrastre de alta flexibilidad (funda de PUR, conductor multifilar).

resumen
En los sistemas de servomotores, los cables Ethernet industriales han reemplazado por completo el método tradicional de control analógico de pulso+dirección y se han convertido en una configuración estándar para los servos de bus. Su valor principal radica en simplificar el cableado, mejorar la velocidad, mejorar la antiinterferencia y lograr una sincronización de alta precisión de múltiples ejes. Es un componente básico indispensable para la fabricación inteligente moderna, los robots industriales y los equipos CNC.