Endüstriyel Robot İçin İşbirliği ve Servis Robotu İç Kablosu
Endüstriyel Robot İçin Bu İşbirliği ve Hizmet Robotu Dahili Kablosu, özellikle işbirlikçi robotlar, tüketici elektroniği endüstrisindeki yüksek hassasiyetli robotlar ve uzun süreli bükme, bükme ve yüksek yoğunluklu hareket gerektiren zorlu ortamlarda çalışan robotlar gibi küçük boyutlu robotların dahili bağlantı kabloları için uygundur. Bu iç bağlantı telleri yüksek yoğunlukta bükülme, bükülme, çekme ve basınç gerilimine dayanma kapasitesine sahip olmanın yanı sıra soğuğa, yüksek sıcaklıklara, yağa ve kimyasallara karşı da mükemmel direnç gösterir. Bu, robotların ultra yüksek stabiliteyle uzun süreli, sorunsuz çalışmasını sağlar.
Endüstriyel Robot İçin Robot İç Tel Teknik Parametre
● Ultra yüksek mukavemetli ve eğilme, bükülme performansına sahip özel flor reçine izolasyonu
● TUV 2 PfG 2577 Sınıf V gereksinimlerine uygundur
● Sıcaklık aralığı: Mobil kurulum -40°C ila +125°C Sabit kurulum -80°C ila +150°C
● Nominal gerilim Uo/U 300/500 V
● Test voltajı 2000V
● Yalıtım direnci Minimum 100 MOhm xkm
● Minimum bükülme yarıçapı: Mobil kurulum 6x kablo çapı Sabit kurulum 4x kablo çapı
● AB RoHS ve Reach düzenlemeleriyle uyumludur
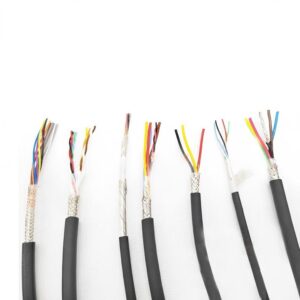
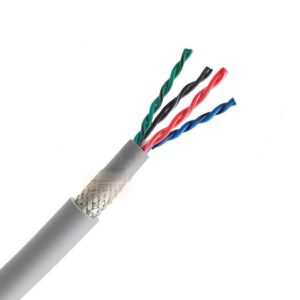
Endüstriyel Robot İçin Robot İç Teli Yapı
● Kalay kaplı bakır iletken (0,5mm2'nin altında) veya çıplak bakır (0,5mm2 ve üstü), ultra ince bakır tel, DIN VDE 0295 Sınıf 6 ve IEC 60228 Sınıf 6'ya uygundur
● Özel flor reçine izolasyonu
● Renk kodlu çekirdek telleri
● Damarların optimum eğimde bükülmesi
● Dar alan kablolaması için kılıfsız tasarım

Endüstriyel Robot İçin Robot İç Teli(Sürükleme zinciri için 50 milyon kez güvenilirlik testi) |
||||
| HAYIR. | Ürün Kodu | Çekirdek Sayısı ve kesit alanı | Yaklaşık dış çap (mm) | Dış kılıf rengi |
| (NO.Xm㎡) | ||||
| 1 | RO-F5001.01.0014 | 1×0,14 | 00,9 | 10 Renk |
| 2 | RO-F5001.01.0020 | 1×0,2 | 1 | 10 Renk |
| 3 | RO-F5001.01.0030 | 1×0,3 | 1.2 | 10 Renk |
| 4 | RO-F5001.01.0050 | 1×0,5 | 1.4 | 6 Renk |
| 5 | RO-F5001.01.0075 | 1×0,75 | 1.9 | 6 Renk |
| 6 | RO-F5005.02.0014 | 1×2×0,14 | 1.8 | / |
| 7 | RO-F5005.02.0020 | 1x2x0,2 | 2 | / |
| 8 | RO-F5005.02.0030 | 1x2x0,3 | 2.4 | / |
| 9 | RO-F5005.02.0050 | 1x2x0,5 | 2.8 | / |
| 10 | RO-F5005.02.0075 | 1x2x0,75 | 3.8 | / |
| 11 | RO-F5005.04.0014 | 2x2x0,14 | 2.7 | / |
| 12 | RO-F5005.04.0020 | 2x2x0,2 | 3 | / |
| 13 | RO-F5005.04.0030 | 2x2x0,3 | 3.6 | / |
| 14 | RO-F5005.04.0050 | 2x2x0,5 | 4.2 | / |
| 15 | RO-F5005.04.0075 | 2x2x0,75 | 5.7 | / |
| 16 | RO-F5005.06.0014 | 3x2x0,14 | 3 | / |
| 17 | RO-F5005.06.0020 | 3x2x0,2 | 3.3 | / |
| 18 | RO-F5005.06.0030 | 3x2x0,3 | 4 | / |
| 19 | RO-F5005.08.0030 | 4x2x0,3 | 4.6 | / |
Farklı iletken kesit alanlarına, malzemelere, ekranlamaya, renklere ve kılıf için diğer özelliklere sahip kablolar da dahil olmak üzere özel modellerin gereksinimlere göre özelleştirilmesi mevcuttur.


Robot gövdesi kablo test standartları
1.Dikey burulma testi
Test yöntemi: 2 metrelik bitmiş bir kablo alın, mesafeyi 200 mm'de sabitleyin, açıyı pozitif ve negatif 180 derece döndürün ve her seferinde 1 dakika boyunca dakikada 12 kez hızda burma işlemi gerçekleştirin.
Karar kriterleri: 1. 500.000 ileri geri hareket döngüsünün aşılmasından sonra açık devre veya kısa devre olmaması. 2.Kılıfta çatlama yok.
2.2D burulma testi
Test yöntemi: 2,5 metrelik bitmiş bir kablo alın, mesafeyi 1 metrede sabitleyin, standart olarak belirtilen ağırlığı uygulayın, açıyı pozitif ve negatif 90 derece veya 180 derece döndürün ve dakikada 60 devir hızında burulma işlemi gerçekleştirin.
Karar kriterleri: 1. 5.000.000 ileri geri hareket döngüsünün aşılmasından sonra açık devre veya kısa devre olmaması. 2.Kılıfta çatlama yok.
3.3D burulma testi
Test yöntemi: 1 metrelik bitmiş bir kablo alın, mesafeyi standart gereksinimlere göre sabitleyin. Üst kısım pozitif ve negatif 90 derece bükülürken, taban pozitif ve negatif 180 derece dönmektedir. Dakikada 30 devir hızında bükme ve burulma gerçekleştirin
Karar kriterleri: 1. 5.000.000 ileri geri hareket döngüsünün aşılmasından sonra açık devre veya kısa devre olmaması. 2.Kılıfta çatlama yok.
4.İki tekerlek bükme testi
Test yöntemi: 5 metrelik bitmiş bir kablo alın ve belirtilen makara çapına ve ağırlığına göre makarayı en az 1,0 metrelik bir hareket mesafesiyle saniyede 0,33 metre hızla ileri geri hareket ettirin. Karar kriterleri:
Karar kriterleri: 1. 1.000.000 ileri geri hareket döngüsünün aşılmasından sonra açık devre veya kısa devre olmaması. 2.Kılıfta çatlama yok.
5,90 derecelik bükülme testi
Test yöntemi: Kablo çapının 2,5 katı bükülme yarıçapına sahip 2 metrelik bitmiş bir kablo alın, standartta belirtilen ağırlığı uygulayın ve dakikada 40 devir hızında bükme işlemi gerçekleştirin.
Karar kriterleri: 1. 1.000.000 ileri geri hareket döngüsünün aşılmasından sonra açık devre veya kısa devre olmaması. 2.Kılıfta çatlama yok.
6. Bükme ve döndürme testi
Test yöntemi: 1,5 metrelik bitmiş bir kablo alın, mesafeyi 300 mm'de sabitleyin, bükülme yarıçapı 150 mm'dir ve dakikada 50 devir hızla döndürün.
Karar kriterleri 50.000 ileri geri hareket döngüsünün aşılmasından sonra açık devre veya kısa devre yok. Kılıfta çatlama yok.