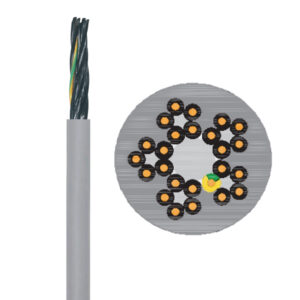
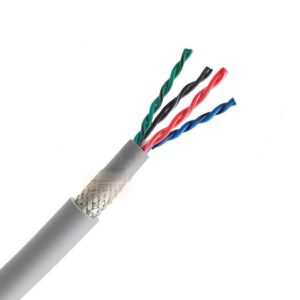
コラボレーションおよびサービスロボット産業用ロボットの内部ワイヤー
この産業用ロボット用コラボレーションおよびサービスロボット内部ワイヤは、協働ロボットなどの小型ロボット、家電業界の高精度ロボット、長時間のねじり、曲げ、高強度の動作が必要な過酷な環境で動作するロボットの内部接続ワイヤに特に適しています。これらの内部接続線は、強い曲げ、ねじり、引張、圧縮応力に耐えることができ、耐寒性、高温性、耐油性、耐薬品性にも優れています。これにより、超高安定性によるロボットの長期にわたるトラブルのない動作が保証されます。




技術的パラメータ
●特殊フッ素樹脂絶縁により超高強度、曲げ、ねじり性能を発揮します。
●TUV 2 PFG 2577クラスV要件に準拠しています
●温度範囲:モバイル設置 -40°C ~ +125°C 固定設置 -80°C ~ +150°C
●公称電圧 Uo/U 300/500 V
●試験電圧2000V
●絶縁抵抗 最小100MOhm xkm
●最小曲げ半径:モバイルインストール6倍ケーブル直径固定インストール4xケーブル直径
●EU ROHSに準拠し、規制に到達します
構造
● DIN VDE 0295 クラス 6 および IEC 60228 クラス 6 に準拠した錫メッキ銅導体 (0.5mm2 未満) または裸銅線 (0.5mm2 以上) の極細銅線
●特別なフルオロレージン断熱
●コアワイヤカラーコーディング
●コアの最適なピッチツイスト
●狭いスペースの配線に適した非被覆設計

| コラボレーションとサービスロボットの内部ワイヤー (ドラッグチェーンの5,000万回の信頼性テスト) | ||||
| いいえ。 | 製品コード | コア数と断面積 | おおよその外径(mm) | 外被シース色 |
| (NO.Xm㎡) | ||||
| 1 | RO-F5001.01.0014 | 1×0.14 | 0.9 | 10色 |
| 2 | RO-F5001.01.0020 | 1×0.2 | 1 | 10色 |
| 3 | RO-F5001.01.0030 | 1×0.3 | 1.2 | 10色 |
| 4 | RO-F5001.01.0050 | 1×0.5 | 1.4 | 6色 |
| 5 | RO-F5001.01.0075 | 1×0.75 | 1.9 | 6色 |
| 6 | RO-F5005.02.0014 | 1×2×0.14 | 1.8 | / |
| 7 | RO-F5005.02.0020 | 1x2x0.2 | 2 | / |
| 8 | RO-F5005.02.0030 | 1x2x0.3 | 2.4 | / |
| 9 | RO-F5005.02.0050 | 1×2×0.5 | 2.8 | / |
| 10 | RO-F5005.02.0075 | 1x2x0.75 | 3.8 | / |
| 11 | RO-F5005.04.0014 | 2x2x0.14 | 2.7 | / |
| 12 | RO-F5005.04.0020 | 2x2x0.2 | 3 | / |
| 13 | RO-F5005.04.0030 | 2×2×0.3 | 3.6 | / |
| 14 | RO-F5005.04.0050 | 2×2×0.5 | 4.2 | / |
| 15 | RO-F5005.04.0075 | 2x2x0.75 | 5.7 | / |
| 16 | RO-F5005.06.0014 | 3x2x0.14 | 3 | / |
| 17 | RO-F5005.06.0020 | 3x2x0.2 | 3.3 | / |
| 18 | RO-F5005.06.0030 | 3x2x0.3 | 4 | / |
| 19 | RO-F5005.08.0030 | 4x2x0.3 | 4.6 | / |
要件に応じた特別なモデルのカスタマイズが利用可能です。さまざまな導体断面積、材料、シールド、色、鞘のその他の仕様を備えたケーブルなどです。


ロボットボディケーブルテスト基準
1.変数性ねじれテスト
テスト方法:2メートルの仕上げケーブルを取り、距離を200mmで固定し、角度を正と負の180度で回転させ、毎回1分間毎分12回の速度でねじれを実行します。
判断基準:1。500,000サイクルの前後の動きを超えた後の開回路または短絡はありません。 2.鞘のひび割れはありません。
2.2Dねじりテスト
テスト方法:2.5メートルの仕上げケーブルを取り、距離を1メートルで固定し、指定された重量を適用し、角度を正と負の90度または180度で回転させ、毎分60サイクルの速度でねじれを実行します。
判断基準:1。5,000,000サイクルの前後の動きを超えた後の開回路または短絡はありません。 2.鞘のひび割れはありません。
3.3Dねじりテスト
テスト方法:1メートルの仕上げケーブルを取り、標準要件に応じて距離を修正します。上部は正と負の90度で曲がっていますが、ベースは正と負の180度で回転します。毎分30サイクルの速度で曲げとねじれを実行する
判断基準:1。5,000,000サイクルの前後の動きを超えた後の開回路または短絡はありません。 2.鞘のひび割れはありません。
4.二輪曲げテスト
テスト方法:5メートルの仕上げケーブルを取り、指定されたプーリーの直径と重量に応じて、少なくとも1.0メートルの移動距離で速度0.33メートルの速度でプーリーを前後に動かします。判断基準:
判断基準:1。1,000,000サイクルの前後の動きを超えた後の開回路または短絡はありません。 2.鞘のひび割れはありません。
5.90度ベンドテスト
テスト方法:ケーブル直径の2.5倍の曲げ半径を持つ2メートルの仕上げケーブルを取り、標準で指定された重量を適用し、毎分40サイクルの速度で曲げを実行します。
判断基準:1。1,000,000サイクルの前後の動きを超えた後の開回路または短絡はありません。 2.鞘のひび割れはありません。
6.増加および回転テスト
テスト方法:1.5メートルの仕上げケーブルを使用し、距離を300mmで固定し、曲げ半径は150mmで、1分あたり50回転の速度で回転します。
判断基準は、50,000サイクルの往復運動を超えた後の開回路または短絡なし。鞘にひびが入りません。